前不久看到了大佬基于PCL做的点云聚类 https://www.jianshu.com/p/ae5a53a51ca6 ,自己实现了一遍,发现借助大佬做好的工程还有CmakeList.txt可以快速配置好PCL,免去了繁琐易错的配置过程,比自己配置一遍rabbit.pcd的入门程序来的快多了,很适合作为pcl的入门项目(从配置运行的角度讲的入门,不是大佬的项目入门- -)。
目录
- 下载 PCL1.8.0 安装包
- 安装 PCL1.8.0
- 添加环境变量
- CMAKE创建工程
- 下载安装Cmake
- 下载工程源文件以及CmakeList.txt
- 解压缩工程文件
- Cmake进行Configure&Generate
- 运行程序
- 可视化
- 过滤
- 提取平面
- 去除平面
- 基于Kdtree的DBSCAN聚类
- 自行实现其他功能
- 绘制rabbit.pcd
下载 PCL1.8.0 安装包
http://unanancyowen.com/en/pcl18/

安装 PCL1.8.0


不要让安装程序直接添加环境变量,会报错:path took too long



这里需要安装OpenNI2,安装在PCL的3rdParty中,这里对应的路径是:
D:\PCL1.8.0\3rdParty\OpenNI2
添加环境变量
新建环境变量:
Path中插入:
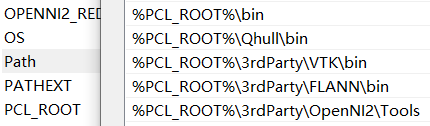
%PCL_ROOT%\bin
%PCL_ROOT%\Qhull\bin
%PCL_ROOT%\3rdParty\VTK\bin
%PCL_ROOT%\3rdParty\FLANN\bin
%PCL_ROOT%\3rdParty\OpenNI2\Tools
CMAKE创建工程
下载安装Cmake
如果没有Cmake可以先下载一个Cmake:
我用的是Cmake3.20.1,版本差的不太大应该没什么影响
下载工程源文件以及CmakeList.txt
https://github.com/JaminJiang/dbscan_kdtree
解压缩工程文件

Cmake进行Configure&Generate
打开Cmake gui
设置好source code的路径以及二进制文件存放路径:

点击condigure:

我们下载的PCL1.8.0对应的visual studio的版本就是2015的且是64位的,这些版本都要对上。
点击Finish,开始Configure:

完成condigure如下所示:

点击Generate:

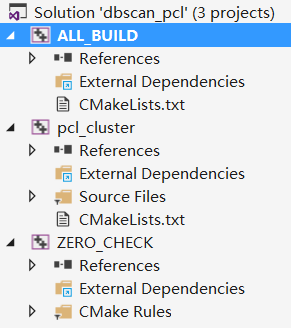
点击Open Project,Solution如图:
运行程序
此时右键pcl_cluster启动项目可以直接运行。

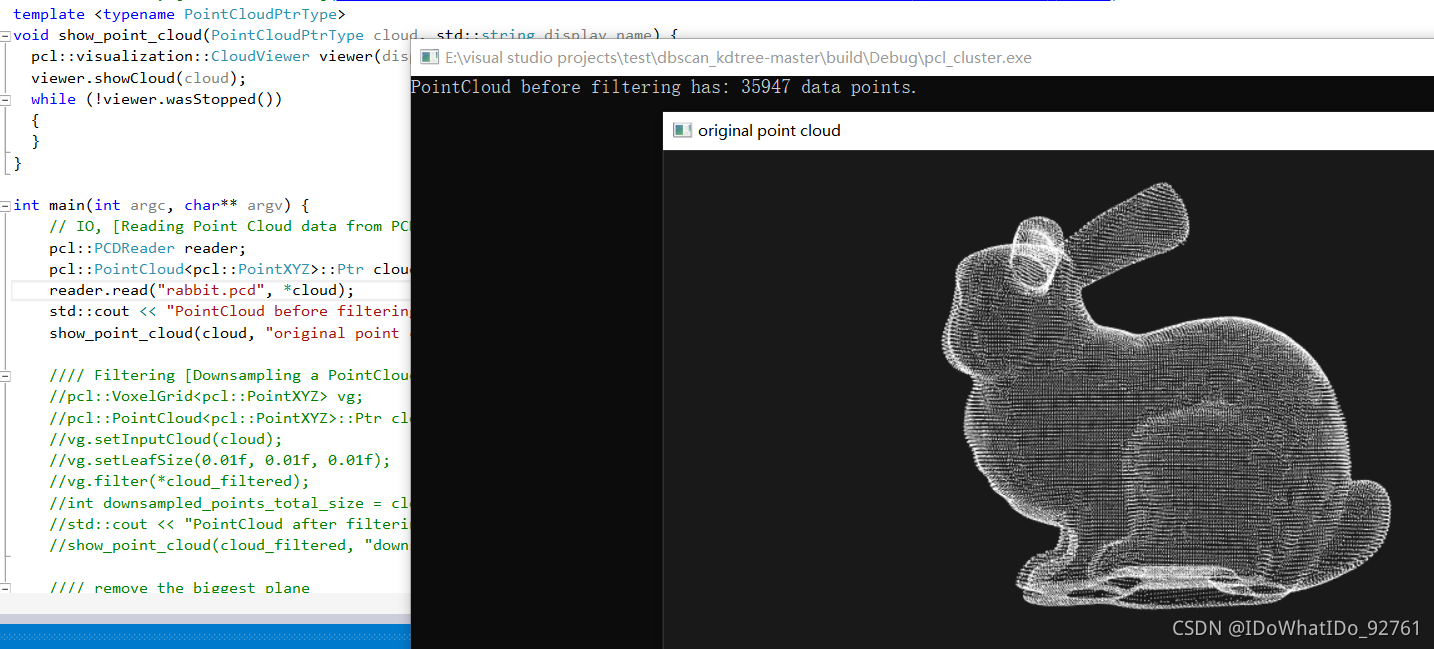
可视化

过滤

提取平面

去除平面

基于Kdtree的DBSCAN聚类

运行结束。
自行实现其他功能
绘制rabbit.pcd
show_point_cloud之后的代码全部注释,把rabbit.pcd文件复制到build文件夹下即可。
相关pcd资源我上传在这:https://download.csdn.net/download/m0_47634756/33194194
接下来可以自行探索了。