目录
一、前言
二、点云聚类分割
三、基于方位搜索L型拟合
四、评价准则之面积最小化
五、评价准则之贴合最大化
六、评价准则之方差最小化
一、前言
对于多线束雷达可以获取目标物体更全面的面貌,在道路中前向或角雷达可能无法获取目标车矩形框但可以扫到两边或者一边,在做目标方向估计时这些信息至关重要。看到一篇文章不错的思路,拿来记录借鉴下。
整体算法:
Step1: 将距离点按照预先设定的距离阈值进行聚类划分簇
Step2:基于方位搜索+特定准则进行L型拟合,得出4边参数
2.1 矩形面积最小化
2.2 点到边靠近最大化
2.3 点到边方差最小化
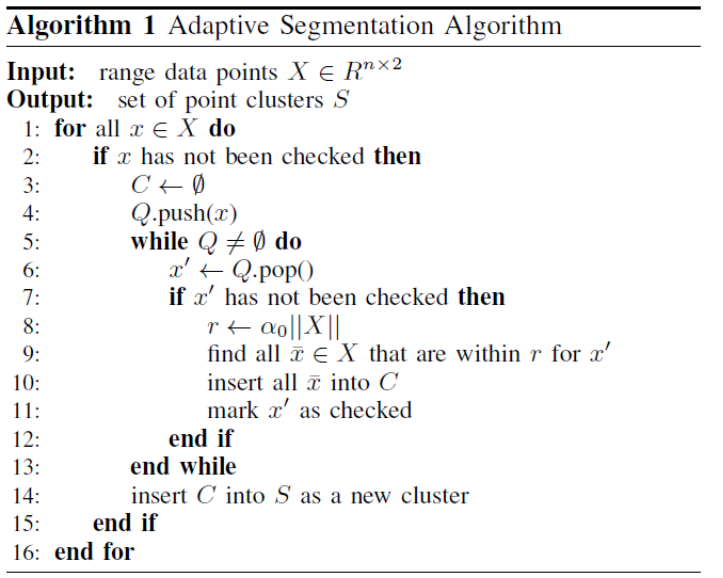
二、点云聚类分割
对于所有点,在距离r一点内找到它的相邻点,将相邻点设置为未检测,对未检测点继续找到距离r内的任何一个点,把邻近点放在这个簇中直到集群不再增长。
def _adoptive_range_segmentation(self, ox, oy):
# Setup initial cluster
segment_list = []
for i, _ in enumerate(ox):
c = set()
r = self.R0 + self.Rd * np.linalg.norm([ox[i], oy[i]])
for j, _ in enumerate(ox):
d = np.hypot(ox[i] - ox[j], oy[i] - oy[j])
if d <= r:
c.add(j)
segment_list.append(c)
# Merge cluster
while True:
no_change = True
for (c1, c2) in list(itertools.permutations(range(len(segment_list)), 2)):
if segment_list[c1] & segment_list[c2]:
segment_list[c1] = (segment_list[c1] | segment_list.pop(c2))
no_change = False
break
if no_change:
break
return segment_list
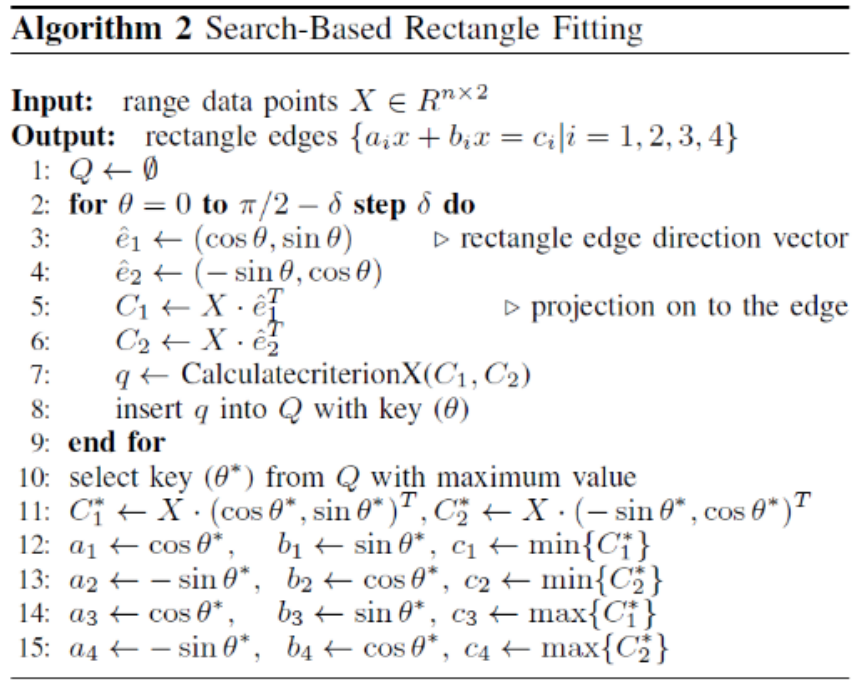
三、基于方位搜索L型拟合
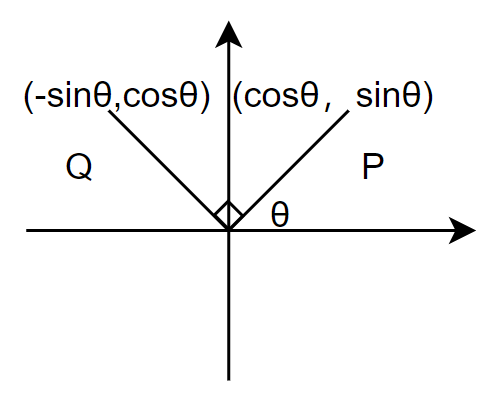
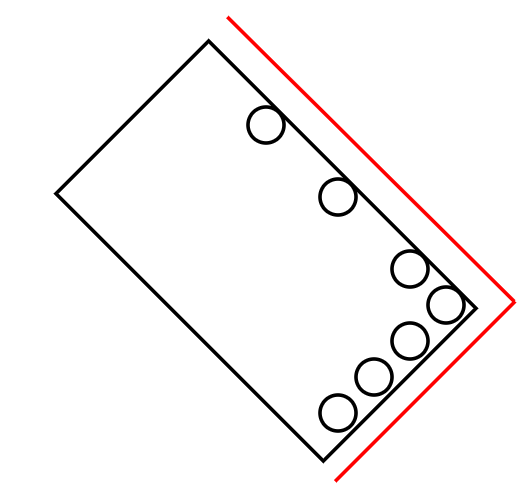
step2:基于方位搜索的L 型拟合
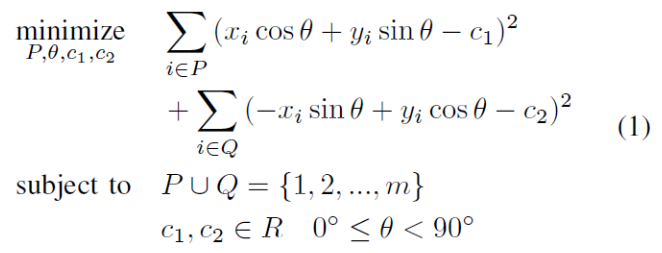
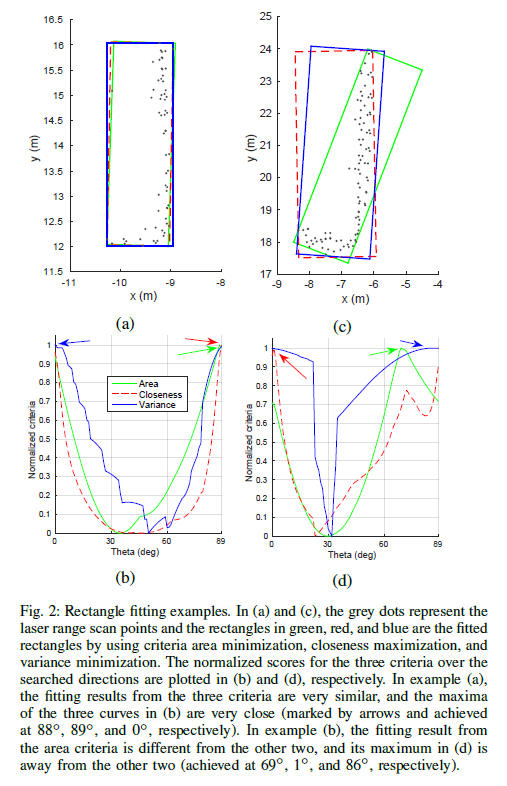
遍历矩形的所有可能方向;在每次迭代中,可以找到一个该方向并包含所有扫描点的矩形;进一步可以得到所有点到矩形四条边的距离,并根据这些距离将点分为P和Q,并计算相应的平方误差作为(1)中的目标函数;在迭代所有方向并获得所有相应的平方误差后,寻找实现最小平方误差的最优方向,并根据该方向拟合矩形
def _rectangle_search(self, x, y):
xy = np.array([x, y]).T
d_theta = np.deg2rad(self.d_theta_deg_for_search)
min_cost = (-float('inf'), None)
for theta in np.arange(0.0, np.pi / 2.0 - d_theta, d_theta):
c = xy @ rot_mat_2d(theta)
c1 = c[:, 0]
c2 = c[:, 1]
# Select criteria
cost = 0.0
if self.criteria == self.Criteria.AREA:
cost = self._calc_area_criterion(c1, c2)
elif self.criteria == self.Criteria.CLOSENESS:
cost = self._calc_closeness_criterion(c1, c2)
elif self.criteria == self.Criteria.VARIANCE:
cost = self._calc_variance_criterion(c1, c2)
if min_cost[0] < cost:
min_cost = (cost, theta)
# calc best rectangle
sin_s = np.sin(min_cost[1])
cos_s = np.cos(min_cost[1])
c1_s = xy @ np.array([cos_s, sin_s]).T
c2_s = xy @ np.array([-sin_s, cos_s]).T
rect = RectangleData()
rect.a[0] = cos_s
rect.b[0] = sin_s
rect.c[0] = min(c1_s)
rect.a[1] = -sin_s
rect.b[1] = cos_s
rect.c[1] = min(c2_s)
rect.a[2] = cos_s
rect.b[2] = sin_s
rect.c[2] = max(c1_s)
rect.a[3] = -sin_s
rect.b[3] = cos_s
rect.c[3] = max(c2_s)
return rect
四、评价准则之面积最小化
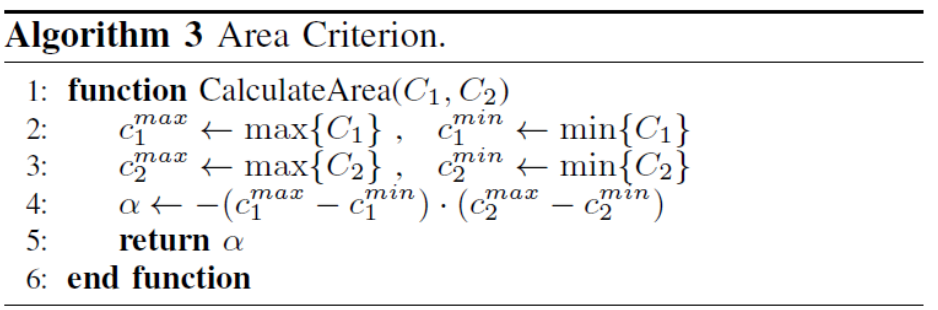
def _calc_area_criterion(c1, c2):
c1_max, c1_min, c2_max, c2_min = LShapeFitting._find_min_max(c1, c2)
alpha = -(c1_max - c1_min) * (c2_max - c2_min)
return alpha
五、评价准则之贴合最大化
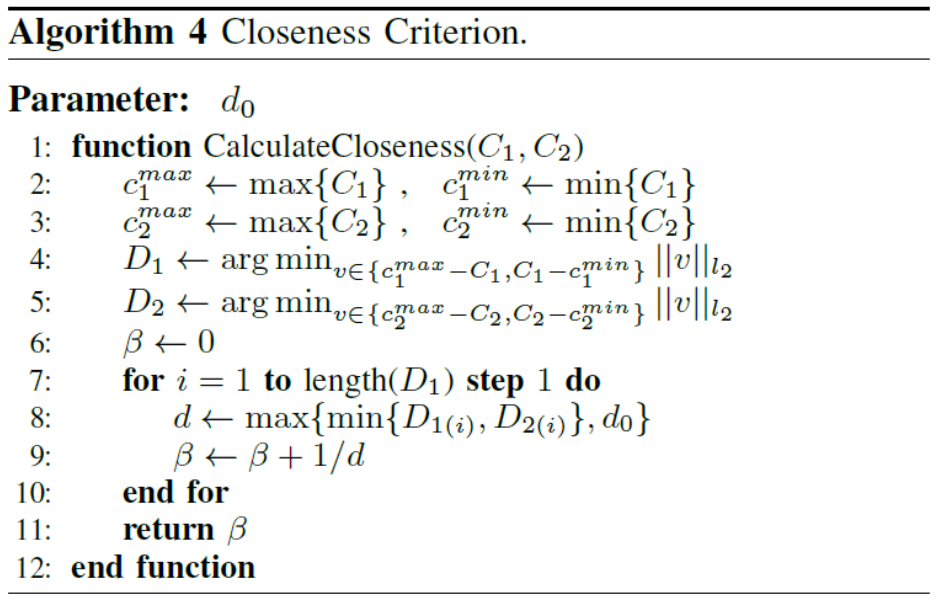
def _calc_closeness_criterion(self, c1, c2):
c1_max, c1_min, c2_max, c2_min = LShapeFitting._find_min_max(c1, c2)
# Vectorization
d1 = np.minimum(c1_max - c1, c1 - c1_min)
d2 = np.minimum(c2_max - c2, c2 - c2_min)
d = np.maximum(np.minimum(d1, d2), self.min_dist_of_closeness_criteria)
beta = (1.0 / d).sum()
return beta六、评价准则之方差最小化
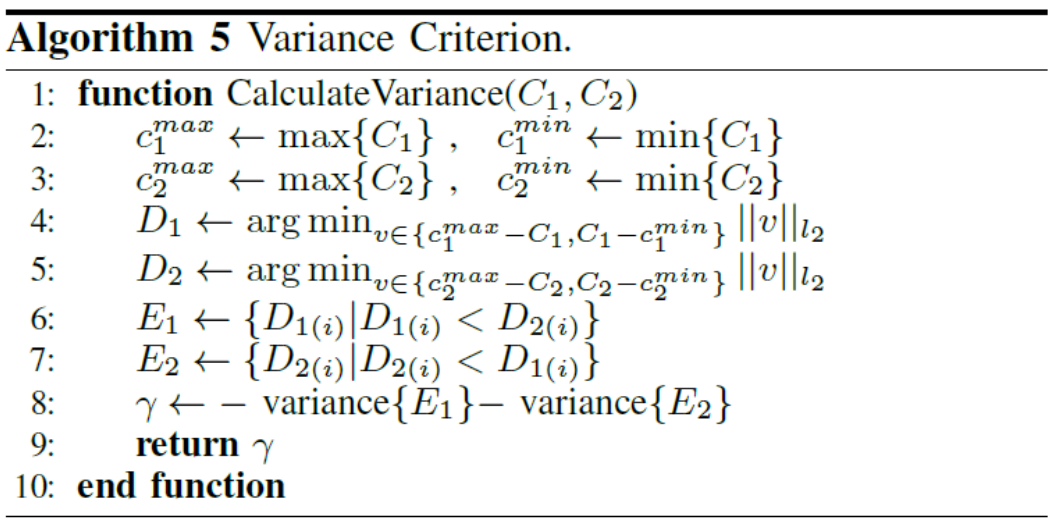
def _calc_variance_criterion(c1, c2):
c1_max, c1_min, c2_max, c2_min = LShapeFitting._find_min_max(c1, c2)
# Vectorization
d1 = np.minimum(c1_max - c1, c1 - c1_min)
d2 = np.minimum(c2_max - c2, c2 - c2_min)
e1 = d1[d1 < d2]
e2 = d2[d1 >= d2]
v1 = - np.var(e1) if len(e1) > 0 else 0.
v2 = - np.var(e2) if len(e2) > 0 else 0.
gamma = v1 + v2
return gamma
Result:
参考:《Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners》